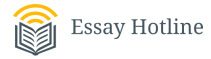




The system to be studied involves the positioning of a mechanical load characterised by mass and frictional damping. The load is moved by a hydraulic actuator which responds to a control voltage, and the coupling arrangement between the actuator and load has to be able to cope with a certain amount of flexing – so it is “springy”. ControlActuatorLoadvoltagepositionpositionu (V)Hydraulicq (mm)Couplingy (mm)Actuatorand load Figure 1 – The Open-Loop System The Laplace transfer function model of the hydraulic actuator is: The LTF model of the coupling and load is:Y (s)=14.52+ 4s+ 20+Q(s)s2 Q(s)=8U (s)s +8You will investigate some aspects of the open-loop behaviour of this system, and then design and test a closed-loop controller, designed using state-space methods, to change the behaviour, in an effort to meet the specification given below. Specification The test input to the system (both in open- and closed-loop) is to be a step of 5 V. The indicators to be used in evaluating the performance for the purposes of this assignment are these: • The steady-state error between y and the applied step input must be zero. Thus, since e = r – y, a step input of h Volts at r should result in an ultimate output movement of h mm at y in the closed-loop system, at steady-state. • The percentage overshoot in the step response should be less than 5% of the final value. • The rise time from 10% to 90% of the final value should be less than 400 ms. • The settling time to within ±1% of the final value should be less than 2 s. In the following questions, 1 to 3 areto be done completely “by hand”, so no computerassistance should be used. Question 4 requires computer assistance using MATLAB. 2
1. For the time being, ignore the hydraulic actuator, so that the system modelbecomesY (s)=14.5(with the appropriate value of N from your + 4s+ 20+ NQ(s) s2student number inserted, as described above). By analysing the steady-state behaviour of this model, and by sketching its step response to a 5 mm step input at q (which you can do by comparison with the standard second-order curves, such as those on p.134 of Dutton, Thompson and Barraclough) discuss the open-loop performance of this model when compared with the specification above. Your sketch of the response need not be particularly accurate, but it must at least show the values you have used in your discussions. [30 Marks]
2. Remembering that the model used in Question 1 is actually an approximation to the full system model, imagine that the hydraulic actuator LTF is now reinstated to give the full third-order model of Figure 1, with a 5 V input step now applied at u. No numerical results are expected here, but you should now explain why you would expect each of the four performance indicators to get better, or worse, or be unaffected by this change, compared with your discussion in Question 1.[20 Marks]
3. (i) Obtain a state-space model of the open-loop system shown in Figure 1. [5 Marks] (ii) Choose a set of desired closed-loop pole locations which you think might meet the required specification, and design a state-variable feedback system to place the poles in those locations. Explain your choice of pole locations, and also explain whether there are any parts of the specification which you know cannot be met by this simple controller and why. [30 Marks]
4. Use MATLAB to test your design from Question 3. If you are familiar with SIMULINK, that may be the easiest approach, but it can equally all be done with straightforward MATLAB commands. Details of how the simulation is done will be discussed in the laboratories. Present the Simulink set-up of controlled system, plots of the output yand of the control signal u, and comment on the system’s performance.
